

Sustr@ck
- Contact:
- Partner:
FAST, AIFB, ECON, IAR, IFAB, IfV, IPEK, ITIV, KASTEL and the mobility center of the KIT
- Startdate:
01.07.2025
- Enddate:
30.06.2027
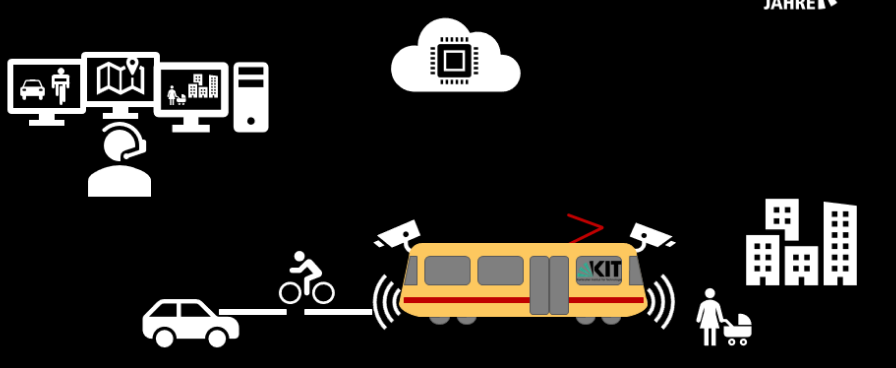
Increasing automation in rail-bound transportation requires a deep understanding of human-machine interaction under real conditions. For human factors research, this opens up the opportunity to investigate key issues of trust, acceptance and mental stress in safety-critical and dynamic environments. Our aim is to design human-centered interfaces and ergonomic fallback levels that are not only functional but also psychologically compatible.
In the project, we deal with two central human-centered aspects of automated streetcar systems: Firstly, we are researching the trust and acceptance of passengers and other road users, for example by analyzing mobility needs and designing internal and external human-machine interfaces. On the other hand, we are developing research designs for the ergonomic design of teleoperation as a fallback level, including the investigation of cognitive load, interaction and decision-making behavior of operators in complex driving situations. The aim is to integrate psychological, ergonomic and safety-related requirements into system development at an early stage.

