


SINA - Sichere Wahrnehmung zur flexiblen Assistenz in dynamischen und unstrukturierten Umgebungen
- Ansprechperson:
- Förderung:
Bundesministerium für Bildung und Forschung (BMBF)
- Projektbeteiligte:
KIT - Intelligente Prozessautomation und Robotik (IPR)
C&S Computer und Software GmbH
MRK-Systeme GmbH
SCHUNK GmbH & Co. KG
Universität Augsburg, Institut für Software
& Systems Engineering (ISSE)
User Interface Design GmbH - Starttermin:
01.07.2017
- Endtermin:
30.09.2020
Durch den Einsatz mobiler Assistenzroboter können die physischen und psychischen Belastungen körperlich eingeschränkter Personen bei alltäglichen Aufgaben reduziert und damit ein möglichst langer Verbleib in der eigenen Häuslichkeit ermöglicht werden. Wichtige Punkte wie die Personensicherheit und die Benutzerakzeptanz bei der Mensch-Roboter-Interaktion sind dabei aber noch nicht ausreichend erforscht.
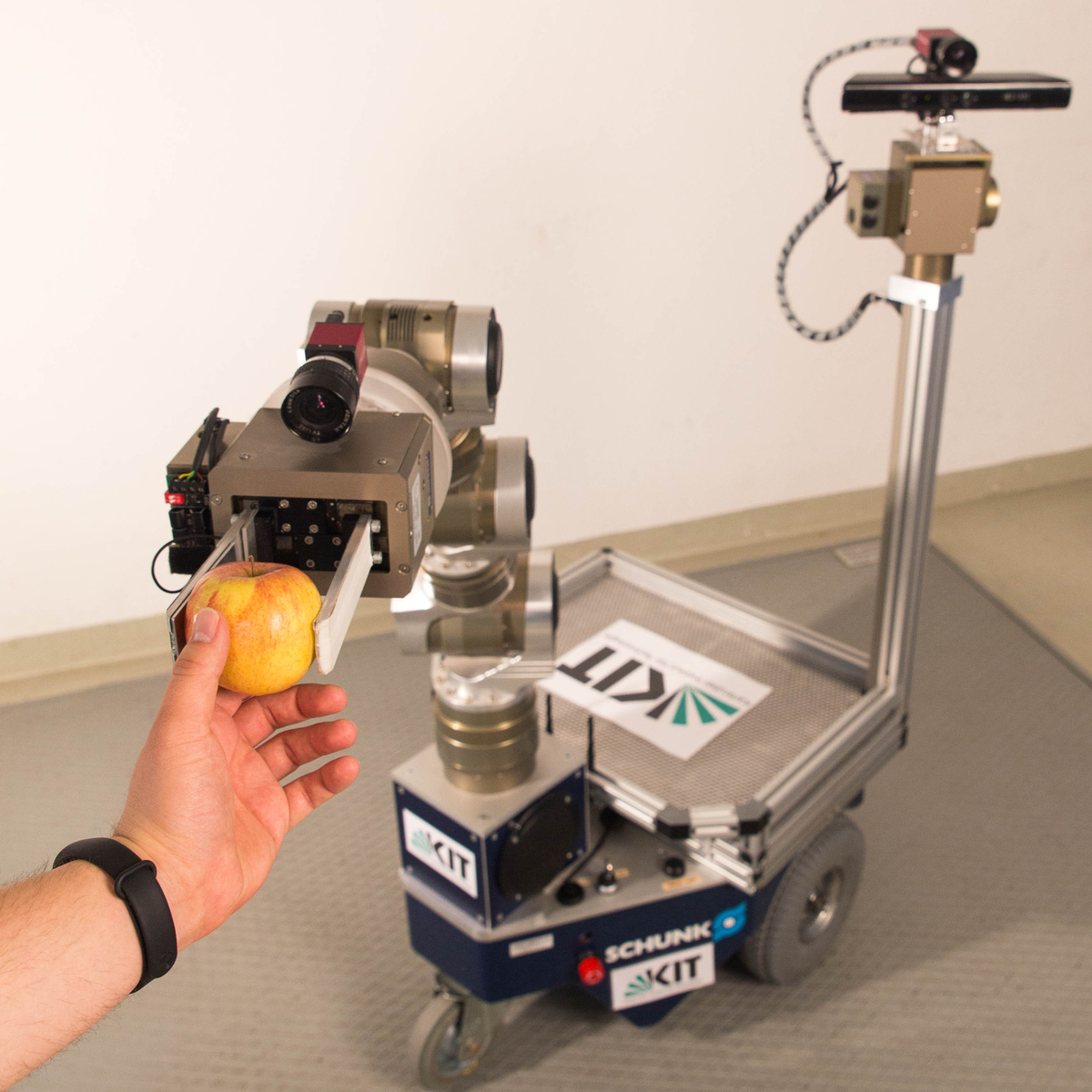
Ziel dieses Projekts ist die Verbesserung der Grundfertigkeiten komplexer Interaktionsstrategien für mobile Assistenzroboter. Im Fokus des Vorhabens stehen Übergabevorgänge zwischen Mensch und Roboter in direkter Nähe, ohne räumliche oder zeitliche Trennung. Durch den Einsatz neuartiger Sensoren, die sowohl Berührungen als auch Annäherungen erkennen können, sollen die kontinuierliche und vollumfängliche Gewährleistung der körperlichen Unversehrtheit als Grundvoraussetzung für Übergabeszenarien mit Berührungspunkten zwischen Mensch und Robotersystem gesichert werden und Übergabevorgänge deutlich sicherer und flexibler gestaltet werden.